Introductory summary
The objective of this SHREC track is to retrieve 3D models captured with a commodity low-cost depth scanner. This dataset, is intended to be an extension of the work done for SHREC'13, but now using the new Kinect One, which provides more detail. The fast the spread of such cameras, has increase the need of better and more detailed datasets. Considering the characteristics of this context, we captured another two hundred more, common household objects. These range from cups and dishes, to staplers, ash trays and so on.
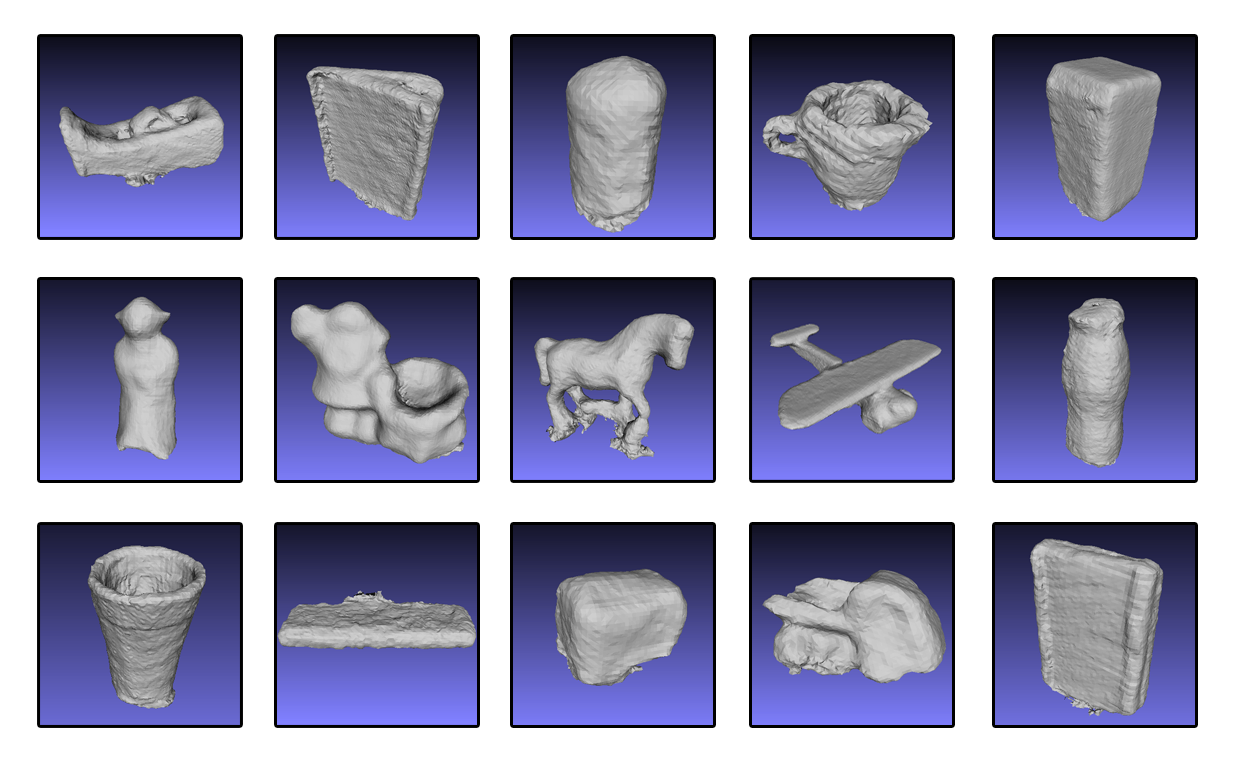
Our dataset provides up to 90 frame pairs of RGB and Depth images for each object, its corresponding registered and segmented point cloud and a polygon mesh model of all objects, carefully processed, instead of just collections of local views. As can be seen by the sample presented in the picture above, these models are still rough representations of models. Although there are already exists techniques that can create more detailed meshes of captured point-clouds, with our dataset we intent to provide a dataset of meshes that could be used in real-time capture and recognition.
Task description
In response to a given set of queries, the task is to evaluate similarity scores with the target models and return an ordered ranked list along with the similarity scores for each query. The query set is a subset of the larger collection.
Ranked lists
Each file representing an evaluation should be named %id-%query where %id is the number of the run and %query is the identifier of the object representing the query. Please submit the results on any ASCII file format such as '.res'.
Example (for a faux query 144.off):
144 1.00000
24 0.87221
45 0.79915
201 0.59102
203 0.54902
32 0.51241
...(etc)...
This would output in a file named, for instance 1-144.res
Data set
The collection is composed of 192 scanned models, which were acquired through the real-time capture of 224 collected objects. Of these, 32 were rejected due to low quality or material incompability. The range images are captured using a Microsoft Kinect One camera. The collection is presented in three different ASCII file formats: PLY, OFF and STL, representing the scans in a triangular mesh.
The collection itself is uncategorized. The rankings are to be compared against a human-generated ground truth created with a group of 20 subjects.
A test set is available here: here
Evaluation Methodology
We will employ the following evaluation measures: Precision-Recall curve; E-Measure; Discounted Cumulative Gain; Nearest Neighbor, First-Tier (Tier1) and Second-Tier (Tier2).
Procedure
The following list is a description of the activities:
-
The participants must register by sending a message to shrec@3dorus.ist.utl.pt. Already registered participants do not need to re-apply.
-
The database will be made available via this website in password protected zip files. Participants will receive the password by e-mail, along with a list of instructions. The set will be available in any of three file formats (PLY/OFF/STL) starting on the 11th of February and until the 15th.
-
Participants will submit the ranked lists and similarity scores for the query set up to the 15th of February. Up to 5 ranked lists per query set may be submitted, resulting from different runs. Each run may be a different algorithm, or a different parameter setting. We ask the participants to provide the binary program that generated the results. If more than one executable or a different parametrization is used, we also ask the submission of appropriate documentation along with a one page summary of the proposed method.
-
The evaluations will be done automatically.
-
The organization will release the evaluation scores of all the runs.
-
The participants write a one page description of their method and commenting the evaluation results with two figures.
-
The track results are combined into a joint paper, published in the proceedings of the Eurographics Workshop on 3D Object Retrieval.
- The description of the tracks and their results are presented at the Eurographics Workshop on 3D Object Retrieval (May 11, 2013).
Schedule
To be updated, will start in the 2nd week of January
| February 7 | - A test set will be available on line. This will be a subset of the final set. |
| February 11 | - Please register before this date. |
| February 11 | - Distribution of the final query sets. Participants can start the retrieval. |
| February 18 | - Submission of results (ranked lists) and a one page description of their method(s). |
| February 20 | - Distribution of relevance judgments (Human-generated) and evaluation scores. |
| February 25 | - Submission of final descriptions (two page) for the contest proceedings. |
| February 28 | - Track is finished, and results are ready for inclusion in a track report |
| March 29 | - Camera ready track papers submitted for printing |
| May 11 | - 8th EUROGRAPHICS Workshop on 3D Object Retrieval including SHREC'2015 |
Any further questions can be sent to shrec@3dorus.ist.utl.pt

