 |
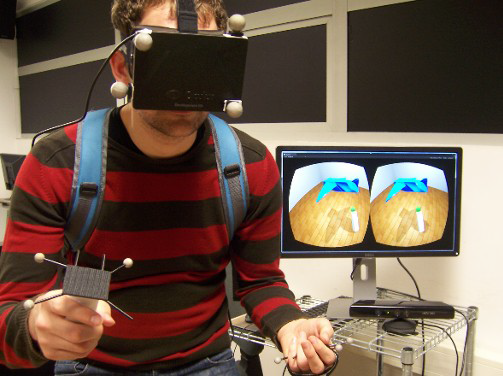
ASfOR: Air-Sketching for 3D Object Retrieval
In this work, our purpose was to create a query specification for 3D object retrieval system, in an immersive environment. Our goal was to explore a new approach to search methods using sketching retrieval, that would allow a natural interaction. The users are immersed in a virtual reality environment and define a sketch query that retrieves similar objects using search mechanisms.
|
|
| |
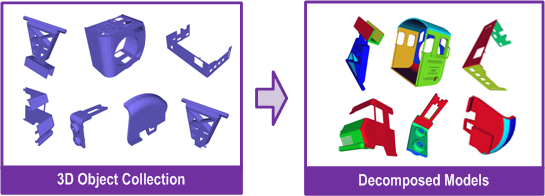 |
CaS: Collection-aware
Segmentation
This research work aims an algorithm for object decomposition that takes into account the
context where the object lay. Unlike most approaches to 3D model segmentation, which
decomposes objects independently of the collection it belongs, the Collection-aware
Segmentation (CaS) approach performs the decomposition in objects considering the details
that distinguishes it from others in the collection. The final result will consist on
decomposing objects into sets of segments relevant to describe it, with respect to the
collection.
|
|
| |
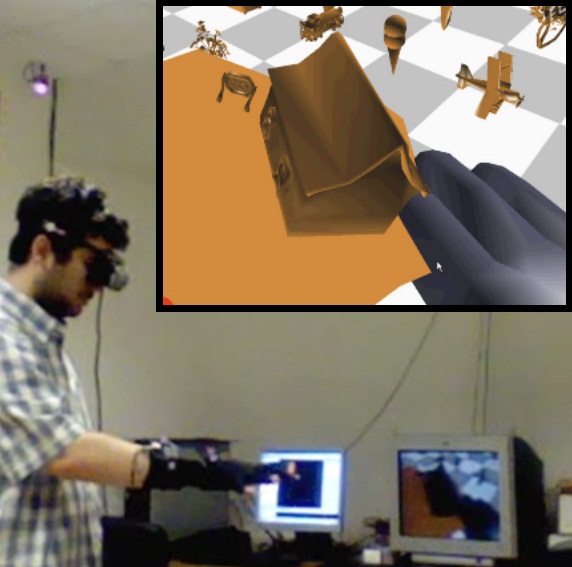 |
Im-O-Ret: Immersive Object
Retrieval
In this work we propose a combination of 3D object retrieval with immersive virtual
reality to provide a rich tool for visualize and navigate in a query results. Instead of
being presented as a list of thumbnails, as traditionally are, these are represented by
3D models in a virtual 3D space and distributed according to their geometric similarity.
This way the user can navigate among the query results and manipulate them using the
latest off-the-shelf, gesture-based interaction devices.
|
|
| |
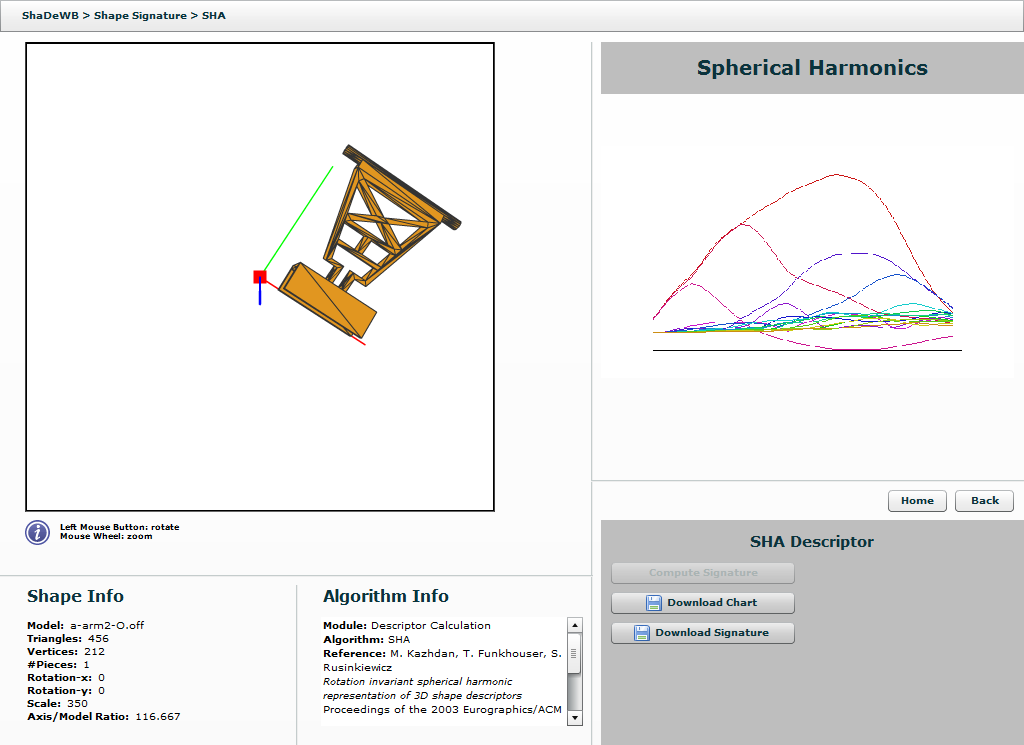 |
ShaAna WB: Shape Analysis
Workbench
The Shape Analysis Workbench (ShaAna WB) focuses the development of a framework that will
provide a simple and centralized workbench for 3D shape analysis, classification and
retrieval algorithms. Aiming at ease-of-use, this workbench intend to cover a wide range
of topics in the field, such as object segmentation, best view selection, shape
description or mesh reconstruction. This innovative system should allow researchers to
study and compare available techniques with minor effort. It also allows researchers to
provide their algorithms to be added to the system.
|
|
| |
 |
BeKi 3D: Benchmark Kinect
Benchmark Kinect focuses on the development of a 3D object benchmark using a low cost depth
sensing camera. Up to this moment, little research has been made regarding the retrieval of 3D
models captured with commodity depth sensing cameras. These cameras are quickly
becoming a staple in many households ever since the release of the Microsoft Kinect
in 2010. The purpose of this work is to construct, propose and organize a track to the
SHape REtrieval Contest (SHREC)'2013 in order to evaluate the effectiveness of 3D-shape
retrieval algorithms in this context. Along with the benchmark, a human-generated ground truth
will be created to back the set of queries with human accepted relevance judgments. The objective
is to publish the results in a joint paper in the proceedings of the Eurographics Workshop on
3D Object Retrieval.
Development blog
Track Webpage
|
|
|

